| ■第1章■ |
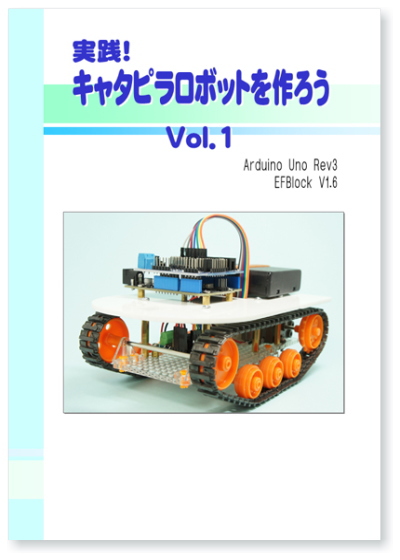
キャタピラロボットを組み立てよう |
1 |
| STEP 1. |
ギヤーボックスを組み立てましょう |
1 |
| 1 |
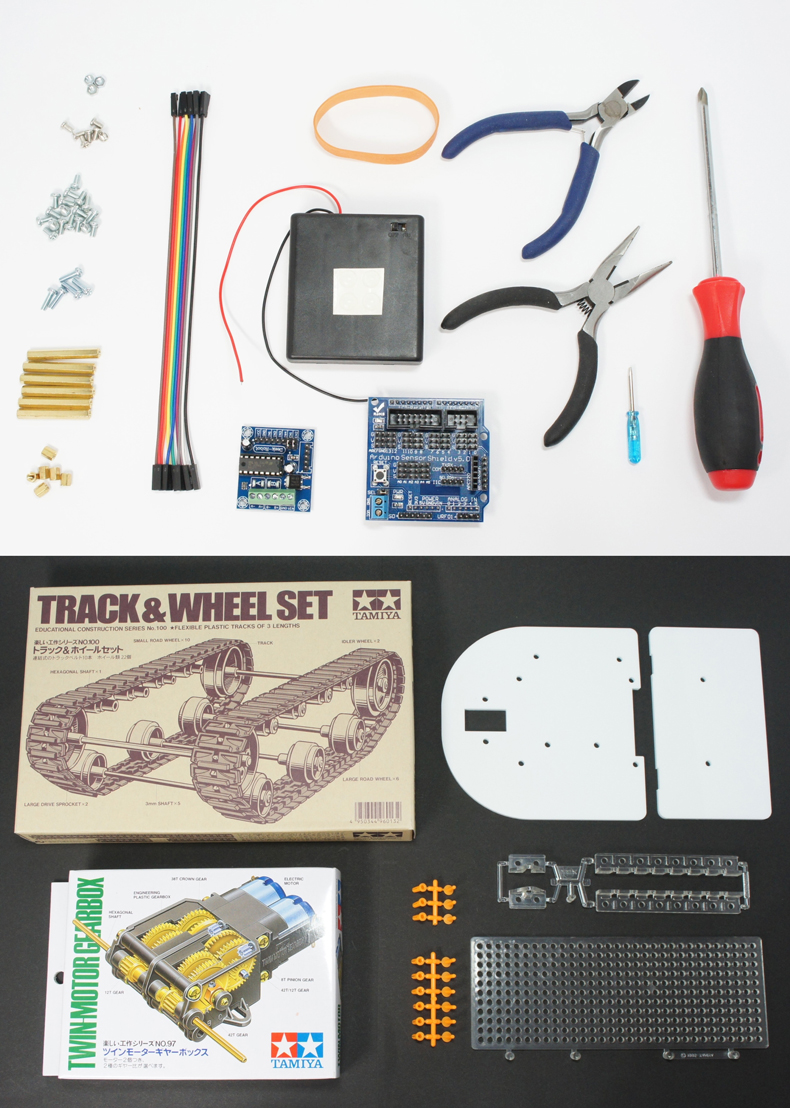
ギヤーボックスの部品を切り取りましょう |
1 |
| 2 |
シャフトを組み立てましょう |
2 |
| 3 |
ギアーボックスの半分を組み立てましょう |
5 |
| 4 |
ギアーボックスの半分をネジで固定しましょう |
10 |
| 5 |
ギアーボックスの反対側の半分を組み立てましょう |
11 |
| 6 |
モーターにギアーをつけましょう |
15 |
| 7 |
ギアーにグリスを塗りましょう |
16 |
| 8 |
ギアーボックスにモーターを取り付けましょう |
17 |
| STEP 2. |
ボディーを組み立てよう |
18 |
| 1 |
ボディーの部品を切り取りましょう |
18 |
| 1 |
ボディーに線を通す穴をあけましょう。 |
19 |
| 2 |
軸受けを組み立てましょう |
20 |
| 3 |
キャタピラの部品を切り取りましょう |
23 |
| 4 |
キャタピラを組み立てましょう。 |
24 |
| 5 |
ボディーにギアーボックスを取り付けましょう |
26 |
| 6 |
ホイールを取り付けましょう |
28 |
| 7 |
モーターシールドを取り付けましょう |
30 |
| 8 |
バッテリーケースを取り付けましょう |
32 |
| 9 |
モーターシールドにケーブルをつなごう |
34 |
| 10 |
マイコンボードを取り付けましょう |
36 |
| 11 |
センサーシールドとモーターシールドをケーブルでつなぎましょう |
39 |
| ■第2章■ |
キャタピラロボットを動かそう |
43 |
| STEP 1. |
モーターを動かしてみよう |
43 |
| 1 |
モーターシールドにつながる5Vの線を外しましょう |
43 |
| 2 |
バッテリーケースに充電電池を入れましょう |
44 |
| 3 |
USBケーブルでARDUINOとパソコンをつなげよう |
46 |
| 4 |
EFBLOCK(イーエフブロック)を起動しましょう |
46 |
| 5 |
シリアルポートの接続先を指定しましょう |
47 |
| 6 |
表示を「ARDUINO(アルドゥイーノ)モード」にしましょう |
48 |
| 7 |
モーターを回すプログラムを作りましょう |
49 |
| 8 |
作ったプログラムをARDUINOに送りましょう |
53 |
| 9 |
モーターの回るスピードを変えましょう |
56 |
| STEP 2. |
前進とバックを繰り返すプログラム |
58 |
| 1 |
左のモーターを動かすブロックを追加しましょう。 |
58 |
| 2 |
キャタピラをはめて動かしましょう |
59 |
| STEP 3. |
方向を変えながら前進するプログラム |
60 |
| 1 |
USBケーブルをつなぎましょう |
60 |
| 2 |
シリアルポートの接続先を指定しましょう |
60 |
| 3 |
プログラムを変更しましょう |
61 |
| 4 |
キャタピラロボットを動かしましょう |
62 |
|
|